
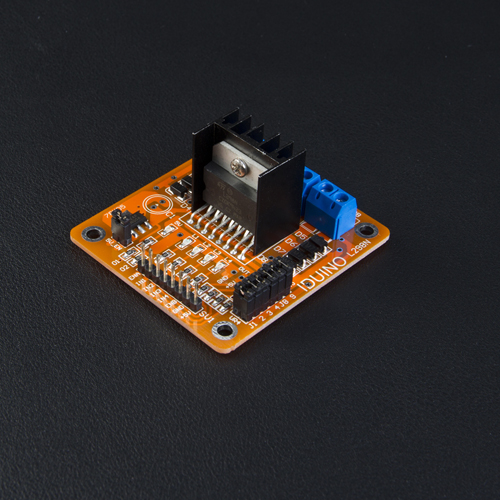
Stepper Motor Controller Module
1. Introduction
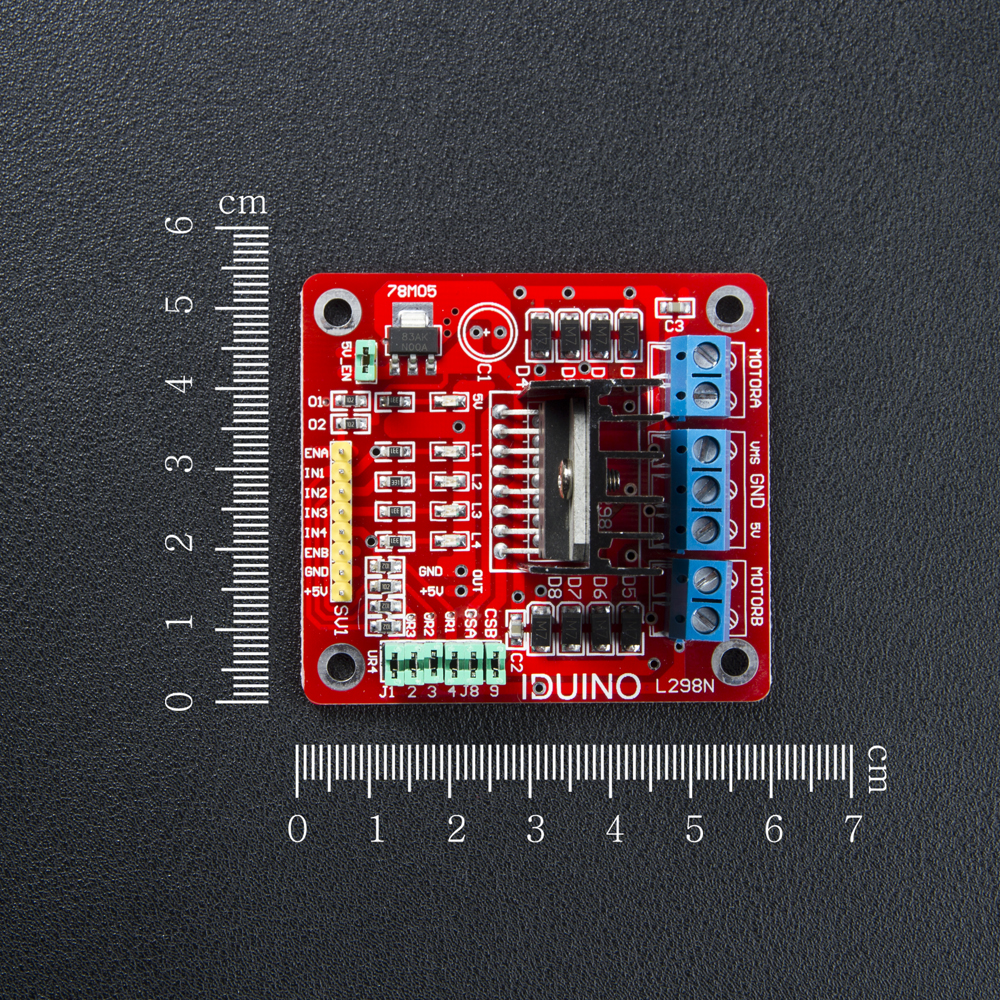
Double H driver module uses ST L298N dual full-bridge driver, an integrated monolithic circuit in a 15- lead Multiwatt and PowerSO20 packages. It is a high voltage, high current dual full-bridge driver designed to accept standard TTL logic levels and drive inductive loads such as relays, solenoids, DC and stepping motors. Two enable inputs are provided to enable or disable the device independently of the input signals. The emitters of the lower transistors of each bridge are connected together and the corresponding external terminal can be used for the con-nection of an external sensing resistor. An additional supply input is provided so that the logic works at a lower voltage.
Specification:
· Driver: L298N
· Driver power supply: +5V~+35V
· Driver Io: 2A
· Logic power output Vss: +5~+7V (internal supply +5V)
· Logic current: 0~36mA
· Controlling level: Low -0.3V~1.5V, high: 2.3V~Vss
· Enable signal level: Low -0.3V~1.5V, high: 2.3V~Vss
· Max power: 25W (Temperature 75 cesus)
· Working temperature: -25C~+130C
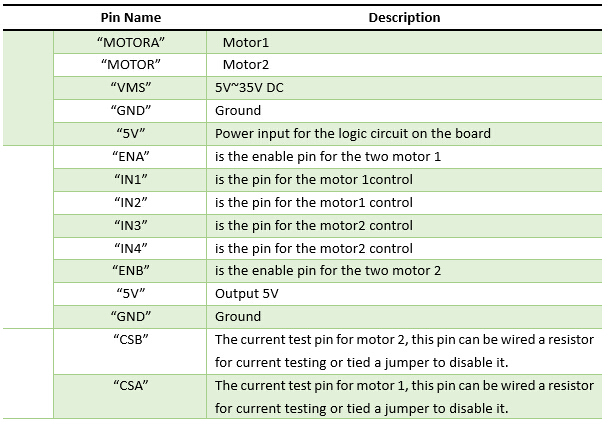
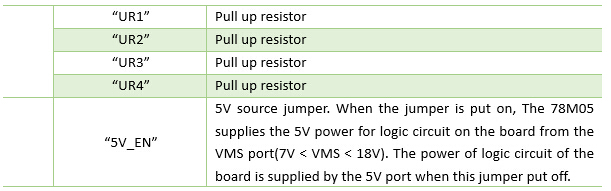
2. Pin Instruction
3. Example
This module can drive 2 channel DC motor or 2 phase stepper motor.
For 2 channel DC motor, connection and code as below:
Connection:
IN1==========13;
IN2==========12;
IN3==========11;
IN4==========10;
int in1=13;
int in2=12;
int in3=11;
int in4=10;
int speedPinA=6;
int speedPinB=5;
void setup()
{
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
pinMode(in3,OUTPUT);
pinMode(in4,OUTPUT);
digitalWrite(in1,HIGH);
digitalWrite(in2,HIGH);
digitalWrite(in3,HIGH);
digitalWrite(in4,HIGH);
}
void loop()
{
_mRight(in1,in2);
_mRight(in3,in4);
int n=analogRead(A0)/4;
_mSetSpeed(speedPinA,n);
_mSetSpeed(speedPinB,n);
}
void _mRight(int pin1,int pin2)
{
digitalWrite(pin1,HIGH);
digitalWrite(pin2,LOW);
}
void _mLeft(int pin1,int pin2)
{
digitalWrite(pin1,LOW);
digitalWrite(pin2,HIGH);
}
void _mStop(int pin1,int pin2)
{
digitalWrite(pin1,HIGH);
digitalWrite(pin2,HIGH);
}
void _mSetSpeed(int pinPWM,int SpeedValue
{
analogWrite(pinPWM,SpeedValue);
}
For 2 phase stepper motor the connection and code as below:
Connection:
IN1=======8;
IN2=======9;
IN3=======10;
IN4=======11;
#include#define STEPS 100 Stepper stepper(STEPS, 8, 9, 10, 11); int previous = 0; void setup() { stepper.setSpeed(90); } void loop() { int val = analogRead(0); stepper.step(val - previous); previous = val; }
2018-10-16 21:19:49
_mSetSpeed?
Comment
Recommended Products
-
 ESP8266 Wifi Shield For ArduinoItem No.: AD010
ESP8266 Wifi Shield For ArduinoItem No.: AD010 -
 2×16 LCD ControllerItem No.: ST1113
2×16 LCD ControllerItem No.: ST1113 -
 Stepper Motor Controller ModuleItem No.: ST1112
Stepper Motor Controller ModuleItem No.: ST1112 -
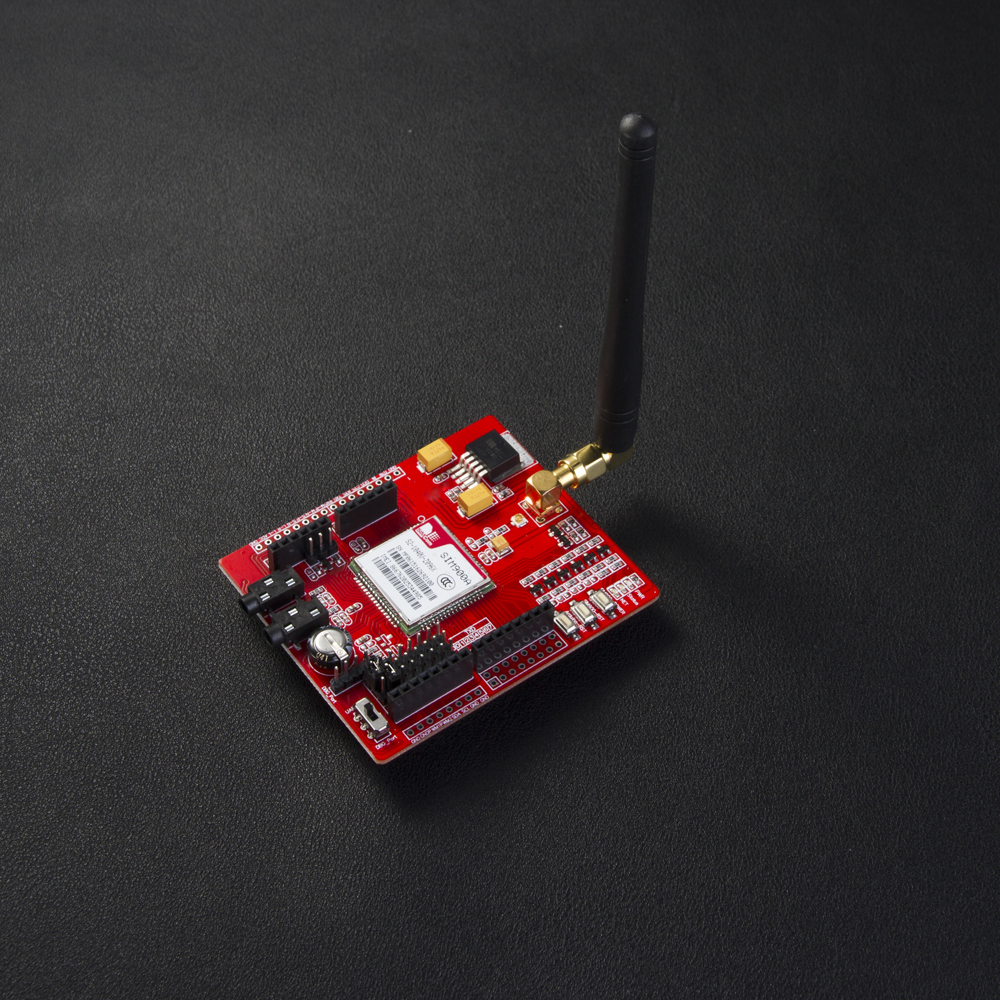 SIM900A GPRS/GSM ShieldItem No.: AD046
SIM900A GPRS/GSM ShieldItem No.: AD046 -
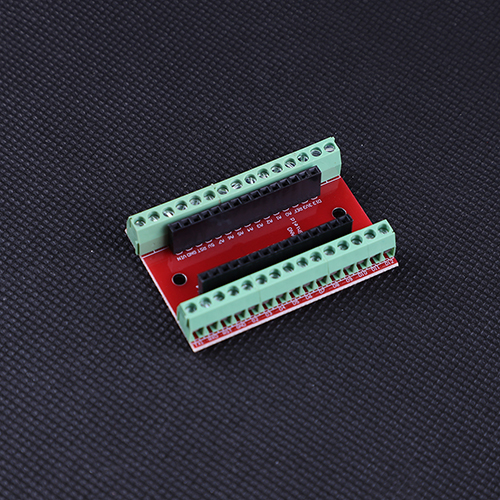 NANO 3.0 Controller TerminalItem No.: EX015
NANO 3.0 Controller TerminalItem No.: EX015 -
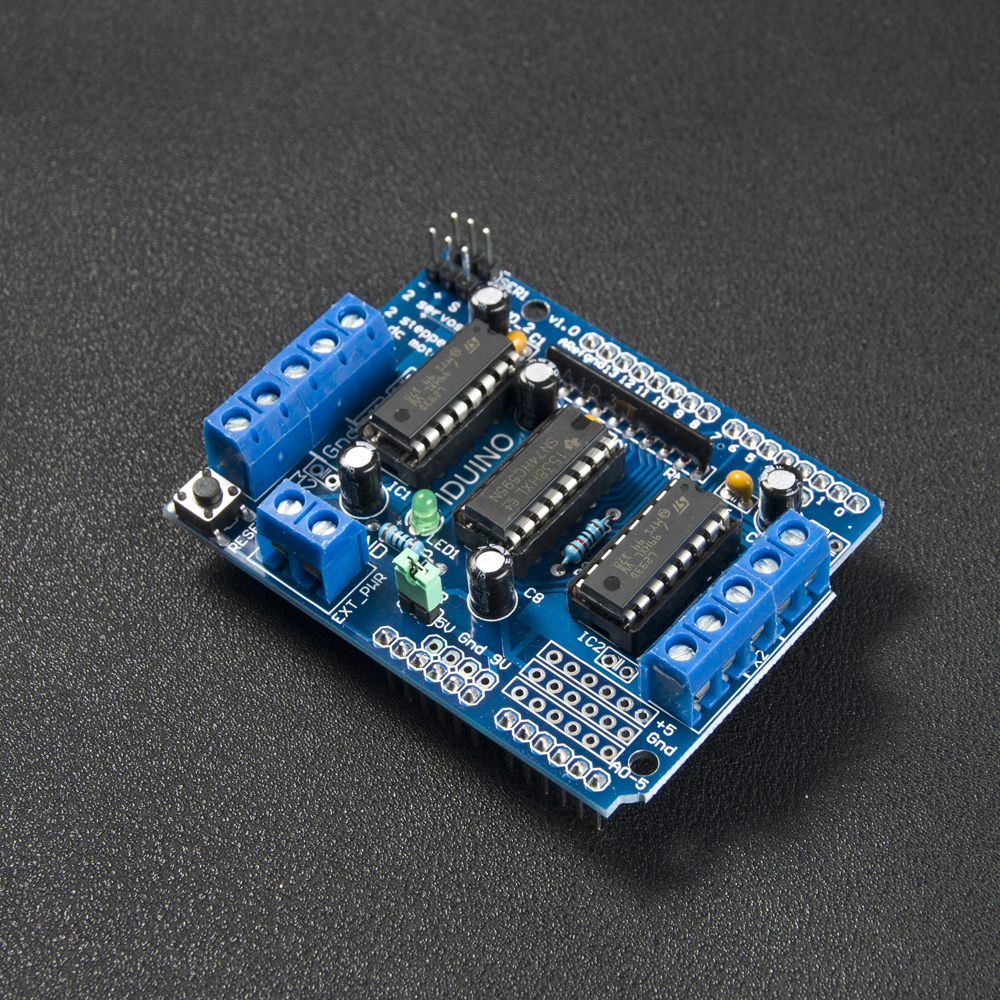 L293D Servo and Motor Controller ModuleItem No.: ST1138
L293D Servo and Motor Controller ModuleItem No.: ST1138 -
 Ethernet Interface ModuleItem No.: ST1160
Ethernet Interface ModuleItem No.: ST1160 -
 PIR Motion Detector ModuleItem No.: SE062
PIR Motion Detector ModuleItem No.: SE062 -
 8×8 Dot matrix drive ModuleItem No.: ST1156
8×8 Dot matrix drive ModuleItem No.: ST1156 -
 Joystick Controller ModuleItem No.: ST1124
Joystick Controller ModuleItem No.: ST1124 -
 Sensor Expansion shield V4.0Item No.: ST1035
Sensor Expansion shield V4.0Item No.: ST1035 -
 5V 8 Channel Relay Module Board for ArduinoItem No.: ME115
5V 8 Channel Relay Module Board for ArduinoItem No.: ME115 -
 Data Log ModuleItem No.: ST1046
Data Log ModuleItem No.: ST1046 -
 4× 5050 RGB LED ModuleItem No.: ME141
4× 5050 RGB LED ModuleItem No.: ME141 -
 Ethernet W5100 R3 Shield Network BoardItem No.: ST1044
Ethernet W5100 R3 Shield Network BoardItem No.: ST1044 -
 8×8 Full-color RGB LED Matrix Driver ModuleItem No.: ST1149
8×8 Full-color RGB LED Matrix Driver ModuleItem No.: ST1149